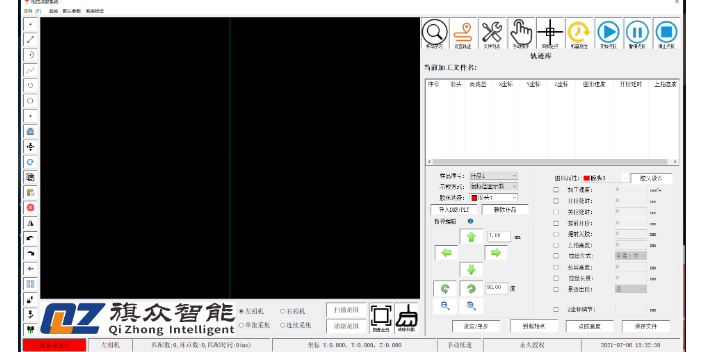
系统简介:该系统是旗众智能耗时多年开发的全功能视觉点胶,滴塑,喷涂,五金上色通用控制器平台,该控制器是CAD绘图+机器视觉+运动控制+数据库管理在点胶行业里的结合,示教更直观,简单,运行速度更快,更平稳,借助视觉定位,匹配,纠正,实现普通系统无法比拟的优势。功能介绍:1、具备编辑点、多线段、圆弧、不规则图形的点胶工作,能适用于任何不规则产品的加工。2、支持电脑导存文件,dxf、plt等文件的导入,可保存产品轨迹模板,再次生产时,只需调用文件模板即可。3、重复精度:,定位精度:,综合精度:±4、支持双平台循环作业,多个点胶头同时加工,有效提高工作效率。5、视觉自动识别定位,无需夹具,支持多种工件360°随意摆放,一次性识别多个工件,批量完成加工。6、完善的点胶处理工艺,做到精细控制点、涂、注每一个产品,胶量大小、粗细,点胶速度、时间等参数皆可自行设置。7、基于PC一体化控制器,接线简单快速,支持自动标定与手动标定两种模式,上手更快,标配1000万像素品牌相机,识别更精细。8、多年专注于点胶行业,不断研发创新,点胶软件简单更好用。9、提供整套方案技术支持,可安排上门调试与培训,24小时远程技术支持,小白也能放心使用。视觉点胶系统支持离线编程,提前规划复杂点胶任务。上海3D视觉点胶系统配置

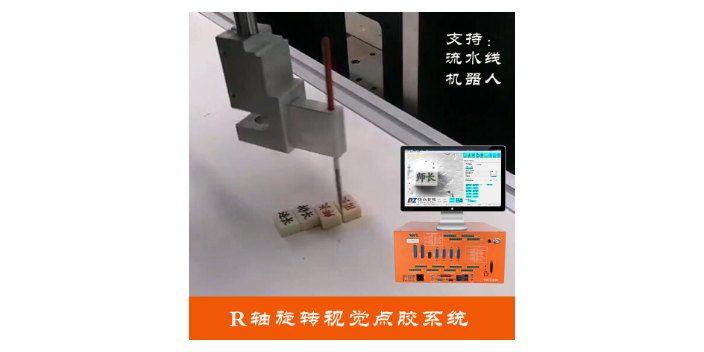
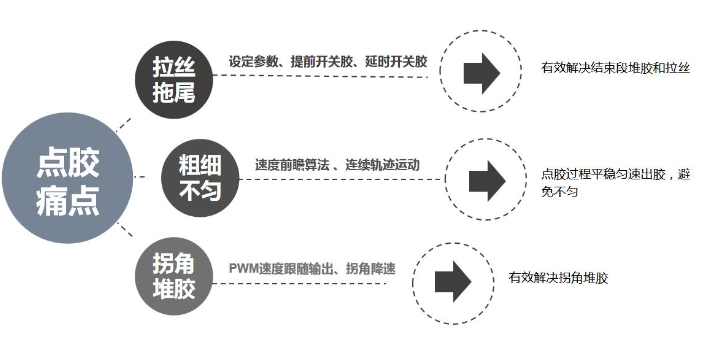
视觉点胶系统在面对复杂的作业环境时,可以采取以下应对策略:传感器选择:选择适合复杂作业环境的高性能传感器。例如,使用高分辨率相机可以提供更精确的图像信息,而使用激光传感器可以在光线不足或表面反射性差的情况下实现精确的测量。光照控制:对于光线条件差的环境,可以使用额外的光源来提供均匀而稳定的照明,以确保视觉系统能够准确地捕捉到工作区的图像。此外,调整相机参数,如曝光时间和增益,以适应光线条件的变化也是重要的。图像处理算法:使用先进的图像处理算法来处理复杂的作业环境。例如,使用自适应阈值算法可以在光照不均匀的情况下实现稳定的目标检测和定位。还可以采用滤波、形态学操作等技术来减少噪声和提取目标特征。姿态检测与校准:针对目标物体在复杂环境中需要出现的倾斜、旋转或形变等情况,需要使用姿态检测算法来获取准确的目标姿态信息。此外,定期进行系统校准以确保视觉系统的准确性和稳定性也是很重要的。惠州3D视觉点胶系统制造商视觉点胶系统优化出胶控制,支持多种工艺参数设置,避免拉丝、滴胶等不良现象。
操作视觉点胶系统需要操作人员具备以下技能:机械知识:操作人员应该了解视觉点胶系统的基本组成结构和工作原理,包括机械部件、传动系统和液压系统等。他们需要知道如何正确操作和调整机械装置,以确保系统的正常运行。视觉系统知识:操作人员需要熟悉视觉系统的原理和功能,了解如何调整和校准相机、光源以及图像处理软件等。他们应该能够识别出视觉系统需要出现的问题,并采取适当的措施进行调整和修复。程序编写能力:一些视觉点胶系统可以通过编程来控制和配置。操作人员需要具备基本的编程知识,能够了解和修改点胶程序、运动轨迹和参数设置等。他们应该能够使用相关软件对程序进行调试和优化。机器操作技能:操作人员需要具备良好的机器操作技能,包括正确启动和关闭系统、调整参数、操作控制面板、观察并理解机器运行状态指示等。他们应该能够熟练地操作机器,并能够迅速处理一些常见的故障和问题。
视觉点胶系统的安装和调试时间取决于多个因素,包括系统规模、复杂程度和客户要求。下面是一般情况下的安装和调试时间估计:安装时间:通常需要几天到几周的时间来完成系统的物理安装。这包括设备的摆放、传感器和摄像头的安装、电气接线等。软件配置和编程:视觉点胶系统需要进行软件配置和编程,以确保系统正常运行并符合客户要求。这一过程通常需要几天到几周的时间,具体取决于系统复杂度和客户需求的定制程度。调试和优化:安装完成后,需要进行调试和优化以保证系统的性能和精度。这个阶段需要需要几天到几周的时间,以确保点胶位置准确、速度和压力适宜,并进行一些测试和验证。视觉点胶系统优化点胶轨迹规划,提升胶水利用率,降低成本。
视觉点胶系统在节约胶水使用方面具有以下几个优势:精确的胶水定位:视觉点胶系统能够准确地识别工件表面特征和胶水施加位置,通过实时图像处理和分析来确定胶水的点胶位置和路径。这使得系统可以在需要的位置精确地施加胶水,避免了胶水的浪费和过多的涂敷。自适应的点胶工艺:视觉点胶系统具有自适应能力,可以根据不同工件的形状、尺寸和要求进行胶水点胶。系统可以根据工件的变化自动调整点胶路径、胶水的施加量和速度等参数,从而极限程度地减少胶水的使用量。实时监测和控制:视觉点胶系统能够实时监测点胶过程中的胶水流动情况和胶线的断裂,当检测到异常时,系统可以及时作出反应,调整点胶参数或停止点胶,避免浪费大量的胶水。视觉点胶系统可控制胶水,减少生产过程中的胶水浪费。佛山R轴旋转视觉点胶系统公司电话
视觉点胶系统可生成点胶工艺报告,便于生产数据管理分析。上海3D视觉点胶系统配置
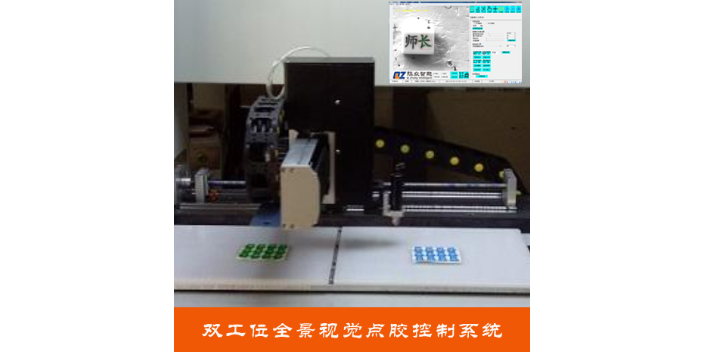
全景+局部双重视觉定位视觉点胶系统是一种结合了全景视觉系统和局部视觉系统的点胶定位方案。它的原理是通过两个不同的视觉系统协同工作,实现对工件的准确定位和点胶操作。全景视觉系统是系统的主要部分,它通常由一个或多个摄像头组成,用于获取工作环境中的全景图像。这些摄像头安装在固定位置,可以涵盖整个点胶工作区域。全景视觉系统使用高效的图像处理算法对全景图像进行分析和处理,提取出工件的整体特征和位置信息。局部视觉系统是系统的辅助部分,通常由一个或多个激光传感器、摄像头或其他高精度传感器组成。它们用于对工件进行更细致的检测和定位。局部视觉系统能够获取工件的局部特征,如边缘、孔洞、标记点等,并提供更高精度的位置信息。在工作过程中,全景视觉系统首先获取全景图像,并使用图像处理算法进行特征提取和目标识别,确定工件的大致位置和姿态。然后,局部视觉系统辅助进行更准确的定位,通过对工件进行细致的检测和分析,提供更精确的位置信息。上海3D视觉点胶系统配置