随着工业4.0的深入推进,智能化制造成为大势所趋。达宽科技的机器人力控技术正是顺应这一潮流的关键推动力。它能够与物联网、大数据等前沿技术深度融合,实现生产数据的实时采集、分析和反馈。通过对装配过程数据的深度挖掘,企业可以不断优化生产工艺,提高产品质量,降低生产成本。这种智能化的生产模式,不仅提升了企...
力控系统基本参数
- 品牌
- 达宽科技,简控机器人,新蓝机器人
- 服务内容
- 技术开发,软件开发,软件定制
- 版本类型
- 测试版,普通版,标准版,升级版,单用户版,代理版,终身使用,增强版
- 适用范围
- 企业用户
- 系统要求
- windows,LINUX
力控系统企业商机
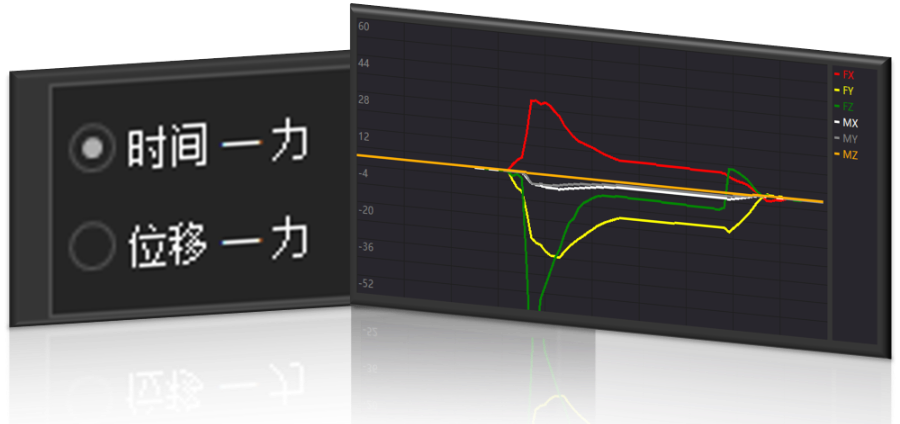
达宽科技的力位检测系统,凭借高精度传感器与先进算法,实时精细监测力和位置的微小变化,确保机器人装配动作精细无误,大幅提升线束装配和测试的精确度与效率,增强装配的稳定性和高效性。系统配备灵活的超限报警功能,用户可为各监测方向设定两级报警阈值。此外,系统具备超限自动退出机制,一旦检测到超出安全值,即刻发出警报并自动中断装配流程,保障线束及接口等元器件的安全。
太空探索领域中,机器人零重力系统可地面模拟太空失重,检测机器人性能与行为。它让机器人模拟执行关键太空任务,如交会对接、卫星维修、空间站维护及清理太空垃圾,保障太空环境与航天器安全。在医疗行业,力控系统为手术机器人带来变革。零重力系统模拟微重力环境下的手术操作,助医务人员适应不同环境下的机器人手术。这使手术机器人在微创手术中更精细、创伤更小,提升手术成功率,加快患者康复。 力控系统在汽车座椅的生产和质量控制中扮演了重要的角色,能提升座椅的装配质量、功能可靠性和用户安全性。河南简控力控系统供应商

以ABB工业机器人为例,我们来讲解如何借助达宽平台级力控大脑装配服务器的多种线束。首先,借助工具坐标系精细地示教多个线束接口与多个服务器接口的对应初始位置。需注意,该服务器拥有多种规格的接口,我们进行了HDMI、USB、电源和网线这四种不同接口、不同粗细线束的装配演示。在装配过程中,利用工装夹持线束接口,使其分别移动到指定点位。针对装配中可能出现的微小偏差和不规则情况,达宽力控系统运用了基于柔性力控的自适应补偿技术。该技术通过六维力传感器实时感知力的细微变化,并据此控制机器人实时调整其位置和姿态,在特定方向上降低力的大小,从而使接口能够精细对接。河南简控力控系统供应商汽车线束装配是连接不同电气设备电缆的关键环节。达宽力控系统能让PCBA的每个连接点达到高标准的质量要求。

随着机器人技术的不断进步,越来越多的机器人开始应用于复杂的生产和生活领域。特别是在精密操作和柔性制造方面,机器人技术已经成为不可或缺的工具之一。本文将以Fanuc机器人和新松多可机器人为例,介绍如何基于达宽平台级力控大脑进行机器人力控座椅熨烫。在汽车内饰制造领域,座椅的舒适度和外观质量是消费者关注的重点。在传统的座椅制造过程中,座椅表面的熨烫往往依赖于人工操作。然而,人工熨烫存在效率低下、质量不稳定、劳动强度大等问题。而自动化熨烫,由于座椅的材料柔软,容易熨烫压力不均匀导致褶皱甚至面料受损。为应对这些问题,达宽科技在多家座椅厂商的自动化座椅熨烫项目中,采取了机器人柔性力控方案。
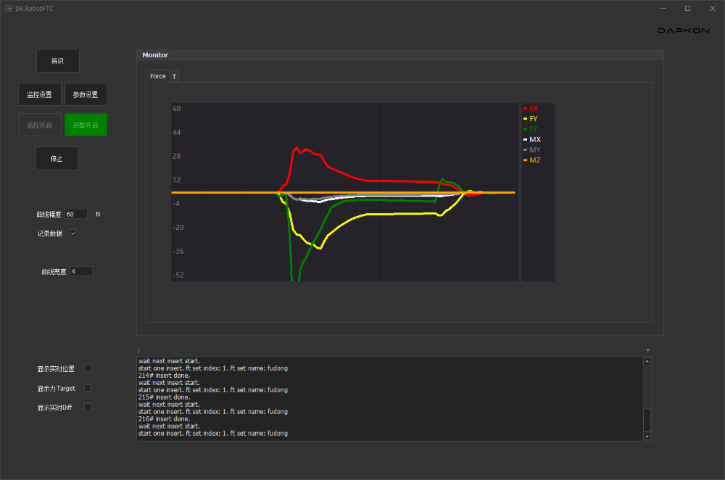
上海达宽科技有限公司,一家专注于机器人力控技术研发的企业,推出了一款兼容多品牌机器人及六维力矩传感器的柔性力控系统。该系统不仅支持实时数据交换,还集成了力矩数据采集、负载识别、策略性控制等多种功能。在测试与检测领域,达宽科技的力控技术被广泛应用于座椅、扶手、空调出风口、机械按键、触摸屏、人造骨骼等部件的检测场景。通过将位置检测与力控检测相结合,机器人在执行任务时不仅能实现精确定位,还能感知并调节施加的力,从而提高了检测的精确性和产品的可靠性,为制造业的质量控制带来了变化。达宽科技的力控系统通过实时的力位调整、监测与记录,有效提升了焊接质量的稳定性和一致性。在汽车工业领域,力控技术助力机器人完成精密装配、打磨、检测等任务;在电子制造业中,机器人借助力控技术能够精确地安装微小的组件,如PCB、FPC、线束排插、硬盘内存、存储卡等。在农业采摘方面,机器人运用力控技术实现对果实的轻柔采摘,减少损伤;在医疗领域,手术机器人利用力控技术进行精细的手术操作,提高了手术的安全性和成功率。展望未来,力控技术将在产业发展中发挥更为关键的作用,为各行业带来更多的价值与变革。机器人力控系统软件支持多种通讯方式,包括I/O、Ethernet,确保与各种工业设备的高效对接。

机器人力控技术,简单来说,就是机器人能够感知并调节与物体接触时所施加的力,保持操作过程中的精确性和安全性。这一技术通过结合力传感器、控制算法和执行器,使机器人能够根据实时反馈调整其动作。与传统的“位置控制”相比,力控更能适应复杂的、动态变化的工作环境,尤其在精密制造、柔性装配等领域表现突出。在机器人熨烫座椅过程中,力传感器会实时检测机器人施加在熨斗上的力。根据反馈,力控系统可以自动调节机器人的运动轨迹,确保所施加的压力稳定在一个理想范围内。这样,不仅可以提高熨烫质量,保障熨烫效果的均匀性,还能减少面料受损的风险。达宽科技的力控系统软件拥有超限自动退出功能。河南简控力控系统供应商
在不同方向和不同强度的载荷下,评估座椅是否存在疲劳或损坏的风险等力控系统通常会记录每次检测的数据。河南简控力控系统供应商
使用达宽平台级力控大脑进行机器人座椅熨烫的详细流程为以下几个步骤:
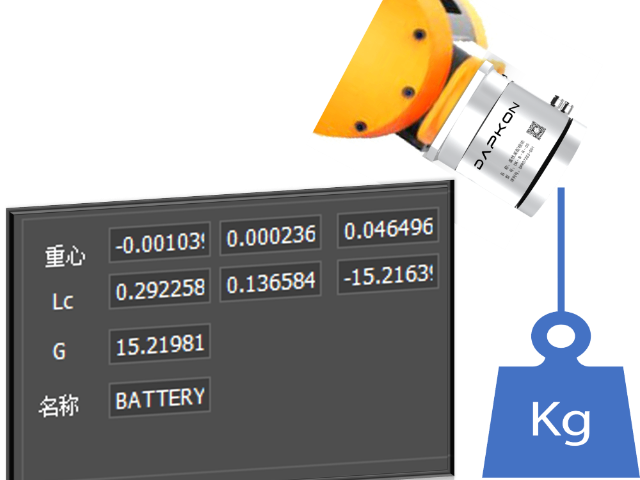
1.配置型号、品牌在达宽力控系统中设置Fanuc机器人和新松机器人的IP地址、选择补偿类型、确定传感器品牌、选择传感器Com口并设置参数。2.设定受力坐标系根据传感器受力面的中心新建工具坐标系,在示教器上切换到该坐标系。3.负载辨识在达宽力控系统中,根据该坐标系对力传感器末端的工装和熨斗进行负载辨识以并设置相关参数,通过程序计算出末端的重心、质量等参数。4.设定工艺参数根据座椅和实际工况,在达宽力控系统中的力控参数设置界面对距离、力、时间、达到距离后力、达到力后时间等参数进行设置。5.启动示例程序在机器人示教器程序按照模版编写好座椅熨烫的程序之后,开启软件系统,运行机器人程序,观察力控调整结果。 河南简控力控系统供应商
与力控系统相关的文章

中国台湾打磨力控系统软件
- 中国香港达宽科技力控系统定制 2025-06-08
- 智能柔性力控系统配置 2025-06-07
- 江苏机器人力控系统设计 2025-06-07
- 柔性力控系统调试 2025-06-07
- 中国香港打磨力控系统报价 2025-06-07
- 上海打磨力控系统优势 2025-06-06
- 中国香港新蓝机器人力控系统使用方法 2025-06-06
- 湖北打磨力控系统方案 2025-06-06
- 辽宁机器人力控系统方案 2025-06-06
- 上海柔性力控系统 2025-06-06
- 柔性力控系统方案 2025-06-06
- 新蓝机器人力控系统调试 2025-06-06
与力控系统相关的产品


与力控系统相关的新闻
-
江苏工业力控系统供应商 2025-06-05 06:06:38力控系统赋能电池线束高效装配在新能源产业高速发展的背景下,电池线束装配的精度与效率直接影响产品性能。达宽科技自主研发的力控系统,通过实时力反馈与自适应调节技术,为线束插接、固定等关键工序提供智能化支持。传统装配依赖人工经验调整力度,易因操作疲劳导致接口虚接或线材损伤。力控系统可动态感知接触力变化,自...
-
中国台湾智能柔性力控系统方案 2025-06-05 11:05:58复杂工艺简化:机器人力控的智能化突破电池防爆阀装配涉及多步骤协同作业,例如阀体定位、弹性元件预压及激光焊接,传统自动化设备难以兼顾灵活性与精度。达宽科技的机器人力控技术通过融合多轴力控与视觉定位,赋予机器人“触觉+视觉”双维感知能力。在装配过程中,系统可自主识别阀体与基座的配合间隙,并通过微米级力控...
-
河南工业力控系统监测 2025-06-05 12:05:18达宽科技的机器人力系统控在电池线束装配领域展现出了非凡的优势。从用户体验的角度来看,该系统操作简便,即使是没有丰富机器人操作经验的人员,经过简短的培训也能快速上手。其友好的用户界面和直观的操作流程,让操作人员能够轻松地设置装配参数、监控装配过程并及时调整。在实际的装配任务中,力控系统能够帮助用户实现...
-
湖北智能柔性力控系统推荐 2025-06-05 10:06:46随着工业4.0的深入推进,智能化制造成为大势所趋。达宽科技的机器人力控技术正是顺应这一潮流的关键推动力。它能够与物联网、大数据等前沿技术深度融合,实现生产数据的实时采集、分析和反馈。通过对装配过程数据的深度挖掘,企业可以不断优化生产工艺,提高产品质量,降低生产成本。这种智能化的生产模式,不仅提升了企...
与力控系统相关的问题
与力控系统相关的标签
新闻资讯
产品推荐
-

湖南工业机器人力控原理
2025-06-08 -
福建协作机器人力控优势
2025-06-08 -

内蒙古工业机器人力控装配
2025-06-07 -
中国台湾机器人力控打磨
2025-06-07 -
安徽协作机器人力控使用方法
2025-06-07 -

江苏协作机器人力控定制
2025-06-07 -

四川机器人力控配置
2025-06-07 -
天津协作机器人力控检测
2025-06-07 -

智能柔性力控系统配置
2025-06-07