蜘蛛机的安全系统持续迭代。JLG X33J Plus配备自动稳定器与篮筐解耦系统,确保平台在复杂地形下的稳定性3。柳工PST300CS集成超载保护、臂架对中检测及应急泵,断电时可手动降台,故障自诊断系统响应时间小于2秒9。凌度智能机器人搭载自锁装置与负压吸附技术,即便断电也能承受1500牛顿压力,抗风能力达12级,彻底杜绝坠落风险10。未来,毫米波雷达与IMU惯性测量单元的应用将进一步实现主动避障与姿态实时监控5。

高曼蜘蛛机的**创新体现在多个技术领域:双缸液压调平系统:通过双溢流阀组与平衡阀的协同控制,实现工作平台在倾斜地面的自动调平,误差小于2°。防冲击机构:在工程车变幅或伸缩限位时,压缩弹簧与信号开关联动,避免机械冲击导致的故障。倾斜式转台:底架后部的转台结构缩短了设备整体长度,同时扩大了臂架作业范围。例如,其详细描述了防冲击机构的机械原理,通过U型安装板与撞击轴的配合,在遭遇异常载荷时触发信号中断,强制设备停止动作,降低安全隐患。宜昌锂电池动力蜘蛛机型号蜘蛛机适应不同场地条件,随时开展作业。

某山区输电塔因雷击导致绝缘子损坏,需紧急抢修。传统高空作业车因道路狭窄无法进入,而蜘蛛机的履带式底盘可适应崎岖地形。其16.5米水平延伸能力精细定位故障点,转台360°旋转功能确保多角度操作。实心橡胶轮在泥地上保持稳定,锂电池供电避免燃油泄漏风险。工作人员通过吊篮完成绝缘子更换,全程*需2小时,比人工攀爬节省70%时间。设备搭载的防冲击机构在遭遇意外载荷时自动触发保护,避免机械损伤,确保作业安全。电力设施维护中的安全实践
蜘蛛机在建筑领域的应用多维度,尤其在高空作业场景中展现出明显优势。例如,CMC推出的S20蜘蛛式高空作业平台,工作高度达20米,总重 只2980公斤,可轻松进入狭窄工地,完成幕墙安装、钢结构检修等任务。其90°+90°旋转吊篮和4米水平延伸能力,解决了传统脚手架搭建耗时、成本高的问题。此外,中国建研院的“蜘蛛式微型起重机”在建筑内修缮中表现突出,其自重轻、可通过电梯或直升机投放的特点,使它能快速抵达高层建筑内部进行设备吊装。例如,在南京某银行改造项目中,该设备 只用2小时完成传统脚手架需要3天的作业量,效率提升80%。蜘蛛机的模块化设计(如快拆系统)还支持快速更换工具,同一设备可适配焊接、清洁、测量等多种任务,明显降低施工成本。蜘蛛机稳定支撑,确保高空作业安全无虞。

多自由度运动控制与平衡算法优化技术难点:蜘蛛机通常配备18个舵机(如知识库[1]所述),需协调多关节同步运动以实现复杂步态(如三角步态、旋转步态)。动态平衡:依赖MPU6050等传感器实时监测姿态,但传感器数据融合(如加速度与角速度互补滤波)需平衡计算效率与精度。例如,知识库[1]提到“姿态控制需处理复杂数据融合,而重力控制虽简单但动态特性不足”。步态规划:在复杂地形(如山地、不平地面)中,需动态调整步态以保持稳定,算法需实时计算支撑腿的分布和重心变化,避免倾覆。协同控制:舵机的同步性直接影响运动流畅性,若控制延迟或不同步,可能导致机械结构卡顿或损坏。解决方案:采用PID控制、模糊逻辑或深度学习算法优化步态;通过DMA传输(如知识库[1]中提到的串口空闲中断机制)减少通信延迟。蜘蛛机跨越低矮障碍物,进入作业区域。甘肃蜘蛛机
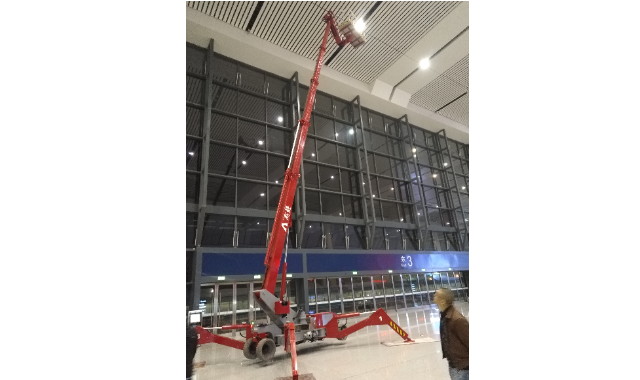
酒店大堂吊灯更换,蜘蛛机迅速高效完成。苏州蓄电池动力蜘蛛机载重能力
蜘蛛机的多功能性在应急救援与文物保护中展现独特价值。在2024年某城市洪灾中,高曼履带式蜘蛛车运送救援人员至屋顶,配合无人机侦察,成功转移受困**120余人。其橡胶履带在积水区域保持稳定,臂架高度达10米,扩展了救援范围。在文化保护领域,故宫博物院使用蜘蛛机修复太和殿彩绘,通过180°平台旋转与10米水平延伸,精细完成顶部彩绘的修补,避免传统脚手架对古建筑的结构影响。其轻量化设计(自重约2980公斤)确保对文物地面无损伤。苏州蓄电池动力蜘蛛机载重能力