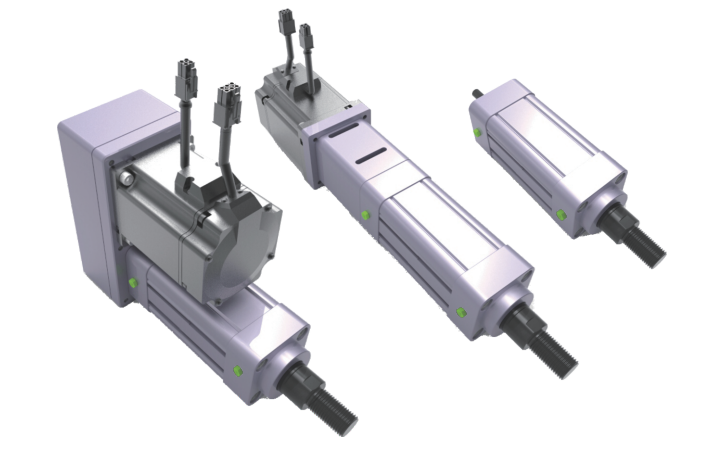
- 品牌
- 霸田,伺服电缸
- 型号
- PSFEA-S016,PSFEA-S025,PSFE40
丝杠作为电缸将旋转运动转换为直线运动的关键部件,起着至关重要的作用。滚珠丝杠是常见的一种类型,其摩擦阻力小,效率高。在数控机床的工作台驱动中,滚珠丝杠式电缸能够快速、平稳地推动工作台移动,实现高精度的加工操作。由于其摩擦阻力小,在运行过程中能够有效减少能量损耗,提高能源利用率,同时延长了丝杠和螺母的使用寿命。梯形丝杠具有良好的自锁性能,适用于低速重载工况。在一些需要承受较大负载且对速度要求不高的场合,如大型仓储货架的升降装置,梯形丝杠式电缸能够稳定地支撑货物重量,并且在停止时依靠自锁性能保持位置不变,确保货物存储和搬运过程的安全可靠。科研实验的材料试验机中,电缸确切控制压力和位移,获取准确的材料性能数据。四川进口霸田电缸批发厂家

在满足基本力速要求后,需聚焦精度等级。根据应用对定位精度和重复精度的要求,选择对应精度的丝杠(如C7通用级,C5精密级,C3/C2超精密级)、导向机构(线性导轨精度等级)和编码器类型(高分辨率旋转编码器或直线光栅尺)。考虑安装方式:法兰式、耳轴式、底座式?是否需要内置/外置限位开关?环境防护(IP等级)是否达标?润滑方式(油脂终身润滑、油润滑、再润滑口)是否满足寿命和维护需求?散热条件如何?是否需要额外散热片或风扇?电气接口(电机类型、编码器反馈类型、总线协议)是否与现有控制系统兼容?结构尺寸(缸径、安装间距、全长)是否满足空间限制?至后,综合评估品牌、成本、供货周期和技术支持能力。成熟的供应商通常提供选型软件或技术支持服务,协助完成复杂的计算和选型。海南进口霸田电缸作用具备智能互联特性的电缸,通过物联网技术,可将运行数据上传云端进行分析优化。
在工业自动化领域,电缸是提升生产线柔性、效率和精度的关键推手。在汽车制造中,电缸精确控制焊接机器人末端执行器的姿态调整、车身定位夹具的锁紧/松开、精密涂胶阀的轨迹控制、零部件的高精度压装(如轴承、衬套),其可编程性适应了多车型混线生产的需求。电子半导体行业依赖电缸进行芯片贴装(Die Bonding)、引线键合(Wire Bonding)、PCB板检测探针台的微米级定位、晶圆搬运机械手的平稳高速运动、SMT贴片机的送料与吸嘴控制。食品饮料包装线上,电缸驱动灌装阀实现精确计量、控制旋盖/压盖扭矩、完成贴标位置的确切调整,其洁净性符合GMP要求。锂电池生产中,电缸用于极片辊压压力控制、卷绕张力控制、注液针精确插入,确保电池一致性和安全性。
电缸的电机部分是其动力关键,常见的有交流伺服电机和直流无刷电机。交流伺服电机动态响应迅速,能够在短时间内实现转速和转向的确切调整,这使得电缸在需要快速启停和频繁换向的工作场景中表现出色。在自动化包装机的封口动作中,交流伺服电机驱动的电缸能够快速响应控制指令,清晰完成封口操作,很大提高了包装效率。直流无刷电机则具有较高的效率和较长的使用寿命。其内部结构设计优化,减少了能量损耗,在一些对电机运行稳定性和耐久性要求较高的应用中,如工业机器人的关节驱动,直流无刷电机驱动的电缸能够持续稳定工作,确保机器人在长时间作业过程中保持精确的动作控制,降低维护成本。电缸通过内置传感器实时采集数据,利用大数据分析可预测潜在故障,提前维护。

例如在夹取易碎的食品时,电爪配合对应的控制器设置为出力模式,可以避免对食品造成损坏。在夹取鸡蛋时,电缸驱动的电爪能够根据鸡蛋的重量和形状,精确控制夹紧力,既保证鸡蛋不会掉落,又不会因用力过大而导致鸡蛋破裂,确保了易碎食品在搬运过程中的完整性。生命科学行业中,电缸在分析仪器中应用普遍。在自动生化分析仪中,电缸可实现自动加物料、摇晃、检测、灌装等动作。其相比气缸更能适应无菌和高温环境,在进行生物样本检测时,电缸能够精确控制加样量和反应过程中的搅拌速度,保证检测结果的清晰性和可靠性,为生命科学研究和临床诊断提供了有力支持。卫星天线调整依赖电缸的精确控制,确保在太空中稳定调整角度,保障通信质量。本地霸田电缸特价
电缸凭借出色的过载保护功能,当负载超标时能迅速响应,避免设备损坏。四川进口霸田电缸批发厂家
化妆品行业对产品的外观和包装质量要求严格,电缸在此大显身手。在化妆品的瓶盖拧紧工序中,电缸能够精确控制扭矩,确保瓶盖拧紧力度适中,既不会过松导致产品泄漏,也不会过紧损坏瓶子。其稳定的控制性能使得每个产品的包装质量都达到高标准,提升了化妆品品牌的形象和市场竞争力。工业机器人领域是电缸的重要应用场景之一。在工业机器人的手臂关节处安装电缸,能够实现多自由度的灵活运动。在汽车零部件的焊接作业中,机器人手臂通过电缸的驱动,能够确切地将焊枪移动到焊接位置,完成复杂的焊接任务。电缸的高精度控制使得焊接质量得到明显提升,同时增强了机器人的灵活性和适应性,拓展了其在不同工业场景中的应用范围。四川进口霸田电缸批发厂家

基于负载和运动需求,进行详细的推力计算至关重要。关键公式为:F_total = F_acc + F_fric + F_grav + F_external。其中:F_acc 是加速/减速所需力(= 总等效质量 * 加速度);F_fric 是克服摩擦的力(需估算导轨、密封等的摩擦系数);F_grav 是克服重力的分量(垂直或倾斜运动时 = m * g * sinθ);F_external 是工作过程中施加的额外外力(如压装力、切削阻力)。计算需考虑运动过程中的至恶劣工况(通常是加减速段)。将计算出的扩大瞬时力(峰值推力)与电缸的峰值推力规格比较,将持续工作段(如匀速段)的力与电缸的额定推力比较,并...
- 上海销售霸田电缸专卖店 2025-06-23
- 重庆工程霸田电缸产业 2025-06-23
- 广东哪里有霸田电缸现货 2025-06-22
- 甘肃本地霸田电缸设备制造 2025-06-22
- 陕西进口霸田电缸进货价 2025-06-22
- 内蒙古哪里有霸田电缸售后服务 2025-06-22
- 江苏机械霸田电缸修理 2025-06-22
- 陕西工程霸田电缸执行标准 2025-06-22
- 江苏国产霸田电缸作用 2025-06-22
- 内蒙古霸田电缸商家 2025-06-22


- 广东多功能霸田电缸哪里有卖的 2025-06-21
- 福建本地霸田电缸售后服务 2025-06-21
- 河北进口霸田电缸售后服务 2025-06-21
- 安徽工业霸田电缸设备 2025-06-21
- 陕西工业霸田电缸加装 2025-06-21
- 湖北工程霸田电缸推荐货源 2025-06-21


- 甘肃本地霸田电缸设备制造 06-22
- 陕西进口霸田电缸进货价 06-22
- 内蒙古哪里有霸田电缸售后服务 06-22
- 江苏机械霸田电缸修理 06-22
- 辽宁塑烧板除尘器生产厂家 06-22
- 陕西工程霸田电缸执行标准 06-22
- 江苏国产霸田电缸作用 06-22
- 黑龙江旋风除尘器标准图 06-22
- 内蒙古霸田电缸商家 06-22
- 青海进口霸田电缸设备制造 06-22