视觉点胶系统的加工速度取决于多个因素,包括点胶的复杂程度、点胶路径的长度、点胶设备的性能等。在一般情况下,视觉点胶系统具有较高的加工速度。由于系统能够实时检测并确定点胶位置和路径,操作人员只需设置好相关参数,系统就能自动完成准确的胶水点胶工作。相比于传统的手工点胶,视觉点胶系统能够避免人工操作的时间消耗和误差,从而提高生产效率。此外,视觉点胶系统还可以进行批量作业,一次设置好参数后可以连续进行多个工件的点胶,进一步提高加工速度和效率。需要注意的是,加工速度还受限于点胶设备的性能和工艺参数的设置。不同的点胶设备具有不同的点胶速度范围和点胶量能力。在选择视觉点胶系统和点胶设备时,应根据具体的应用需求和生产要求进行综合考虑。视觉点胶系统支持自动对针功能模块,减少人工调试时间。杭州3D视觉点胶系统哪里有
视觉点胶系统在生产过程中的数据采集和分析方面提供了重要的帮助。以下是一些相关的优势:实时数据采集:视觉点胶系统可以实时采集生产过程中的数据,包括点胶位置、速度、质量等信息。这些数据可以帮助生产团队了解生产过程的实时状态,快速发现潜在问题并采取相应的措施。过程监控和控制:通过数据采集和分析,视觉点胶系统可以监控点胶过程中的关键参数,并实时反馈给控制系统。基于采集到的数据,生产团队可以实现对点胶过程的精确控制,提高生产效率和产品质量。缺陷检测:视觉点胶系统可以对点胶过程中的缺陷进行检测和分析。通过图像处理和算法分析,系统可以快速识别并定位点胶中的缺陷,如气泡、溢胶等。这有助于及早发现问题,并进行及时的纠正。多轴视觉点胶系统服务商视觉点胶系统支持远程操作,方便实时掌握设备运行状态。
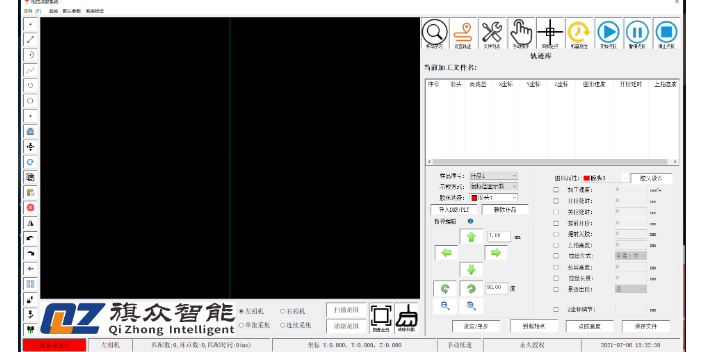
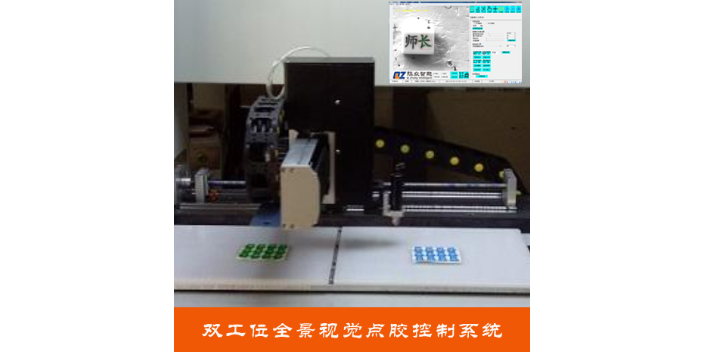
视觉点胶系统如何识别产品位置自动加工:我们的视觉点胶系统如何自动识别产品位置,且不用绘制轨迹就能自动加工。"在机器加工台面上方我们安装了高清工业相机,通过工业相机镜头去捕捉产品的位置,尽管我们的产品随便摆放,但是通过我们先进的图像处理算法,仍然可以实现精确到0.01mm的点胶定位。还有更厉害的是都不用去做点胶路径文件,就能直接根据产品的形状和尺寸自动调整点胶路径来自动点胶,其实这就是我们点胶系统中的自动巡边功能。
视觉点胶系统是工业机器人应用中非常重要的一环,为了优化这一过程,可以考虑以下几个方面:选用合适的硬件设备:视觉点胶系统需要高清晰度的摄像头、快速的图像处理器、高精度的运动控制器等硬件设备。因此,选用合适的硬件设备是优化视觉点胶系统的首要条件。控制系统优化:视觉点胶系统需要高速、高精度的运动控制器对机器人进行控制。通过对控制系统进行优化,可以提升机器人的运动精度和速度,从而提高视觉点胶系统的效率和稳定性。图像处理算法优化:图像处理算法是视觉点胶系统的关键。优化图像处理算法可以提高视觉系统的鲁棒性和准确性,降低误判率,提高点胶效率。涂胶参数优化:根据不同的涂胶需求,合理设置涂胶参数,如涂胶速度、涂胶量、涂胶时间等,可以有效降低涂胶的误差率,提高涂胶质量。视觉点胶系统通过视觉定位补偿,消除工件放置偏差影响。
视觉点胶系统在对小型器件进行点胶时具有优异的性能。因为小型器件的尺寸比较小,需要在精度上更高的要求下进行点胶工作,而传统的手动点胶容易产生误差和不均匀的胶水施加。而视觉点胶系统则能够通过它的图像分析和处理功能,及时进行精确定位和胶水施加,避免了传统手工点胶的问题。视觉点胶系统采用高分辨率摄像头和辅助光源进行图像采集和处理,并能够对小型器件进行高精度的定位和胶水施加。在此过程中,视觉点胶系统能够根据工件的大小、形状、位置等信息,准确地控制胶水的流量和流速,避免了胶水过多或过少的情况发生。以手机点胶为例,视觉点胶系统能够快速准确地完成手机屏幕边框、摄像头、听筒等零部件的点胶工作。视觉点胶系统通过持续技术迭代,始终保持行业水平。中山自动化视觉点胶系统专业厂家
视觉点胶系统支持多种通信协议,实现与其他设备的数据交互。杭州3D视觉点胶系统哪里有
视觉点胶系统通过以下步骤来确定点胶的位置和路径:图像获取:系统使用摄像头或激光传感器获取工作环境中的图像信息。这些图像可以是工件表面的照片或激光扫描得到的三维点云数据。图像处理:系统使用高效的图像处理软件对获取的图像进行分析和处理。图像处理可以包括噪声过滤、边缘检测、形状匹配等算法,以提取出图像中的特征信息。特征识别:系统对处理后的图像进行特征识别,包括识别工件的形状、大小、位置以及其他关键特征。这些特征可以通过比较图像中的特征与预设的模板或标准来进行匹配。点胶位置计算:基于识别到的特征信息,系统计算点胶的位置。这通常涉及到将图像中的特征坐标映射到工件的实际坐标系中,以确定点胶的目标位置。杭州3D视觉点胶系统哪里有