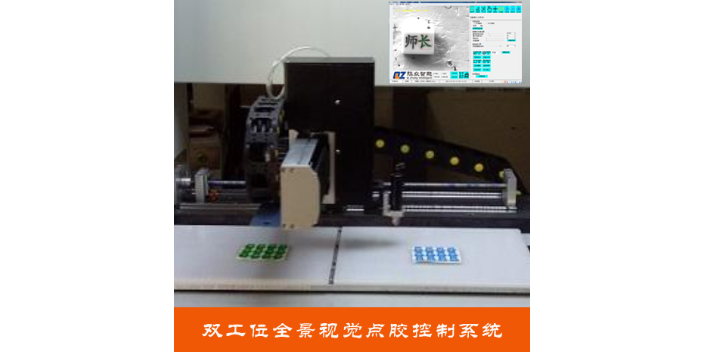
全景+局部双重视觉定位视觉点胶系统是一种结合了全景视觉系统和局部视觉系统的点胶定位方案。它的原理是通过两个不同的视觉系统协同工作,实现对工件的准确定位和点胶操作。全景视觉系统是系统的主要部分,它通常由一个或多个摄像头组成,用于获取工作环境中的全景图像。这些摄像头安装在固定位置,可以涵盖整个点胶工作区域。全景视觉系统使用高效的图像处理算法对全景图像进行分析和处理,提取出工件的整体特征和位置信息。局部视觉系统是系统的辅助部分,通常由一个或多个激光传感器、摄像头或其他高精度传感器组成。它们用于对工件进行更细致的检测和定位。局部视觉系统能够获取工件的局部特征,如边缘、孔洞、标记点等,并提供更高精度的位置信息。在工作过程中,全景视觉系统首先获取全景图像,并使用图像处理算法进行特征提取和目标识别,确定工件的大致位置和姿态。然后,局部视觉系统辅助进行更准确的定位,通过对工件进行细致的检测和分析,提供更精确的位置信息。视觉点胶系统支持产品变形补偿,适应不同工况下点胶需求。深圳R轴旋转视觉点胶系统单价
视觉点胶系统在灰尘多的工作环境下需要会受到一定的影响,但现代的视觉点胶系统通常会采取措施来应对这种情况,以确保系统的正常工作。在灰尘多的环境下,系统需要会受到以下几方面的影响:图像识别:灰尘需要会附着在工件表面或摄像头上,导致图像质量下降,影响图像识别的准确性。此时,系统需要需要进行额外的图像处理来消除或减少灰尘的干扰,或是采用更高灵敏度的图像传感器来提高图像的清晰度。精确定位:灰尘的存在需要会干扰系统对工件位置的精确定位。在系统设计时,可以考虑使用多个视觉传感器或结合其他传感器,如激光测距仪,以提高定位的精度和稳定性。精密结构保护:灰尘需要会进入系统的关键部件或机械结构中,导致部件的磨损或故障。因此,在设计视觉点胶系统时,需要考虑良好的密封和防护设计,以减少灰尘的进入并保护系统的正常运行。惠州3D视觉点胶系统专业厂家视觉点胶系统适用于电子、新能源、汽车、医疗等多行业点胶工艺。
视觉点胶系统—自适应功能:传统的点胶过程中,夹具定位是必不可少的一环。然而,有了我们的视觉点胶系统,您将告别繁琐的夹具定位,降低生产成本,提高工作效率!我们的系统通过高分辨率的图像识别和智能算法,软件能够快速辨识产品的形状和位置。在使用我们的软件时,您只需将相机对准产品,软件会自动识别并捕捉产品的特征点和边缘,从而实现精确的点胶定位。这样,您无需额外投入夹具定位的成本,同时避免了夹具带来的操作复杂性。即使产品形状和尺寸有所变化,我们的软件也能根据实际情况自动调整点胶路径,确保准确的点胶结果。
视觉点胶系统的适用性取决于其设计和材料选择。在高温环境下进行点胶需要存在一些挑战,但也有适用于高温环境的视觉点胶系统。针对高温环境下的生产,可以采取以下措施来确保视觉点胶系统的适用性和安全性:选择高温耐受材料:在高温环境下,点胶系统的部件应选用能够耐受高温的材料,如高温耐受的塑料或金属。这些材料能够在高温下保持稳定性和强度,不受热膨胀或熔化的影响。采用适应高温的粘合剂:选择能够承受高温的胶水或粘合剂是至关重要的。在高温环境下,普通的胶水需要会失去粘合力或产生质量问题。因此,在高温环境下使用专门设计的高温胶水能够确保点胶效果的稳定性和质量。散热设计:在高温环境下,点胶系统的散热也是一个重要考虑因素。过热需要会对系统的性能和稳定性产生不利影响。因此,视觉点胶系统应该设计合理的散热装置,以保持系统在高温环境下的正常运行温度。视觉点胶系统可设置信号灯,进行多重安全防护,保障操作人员安全。

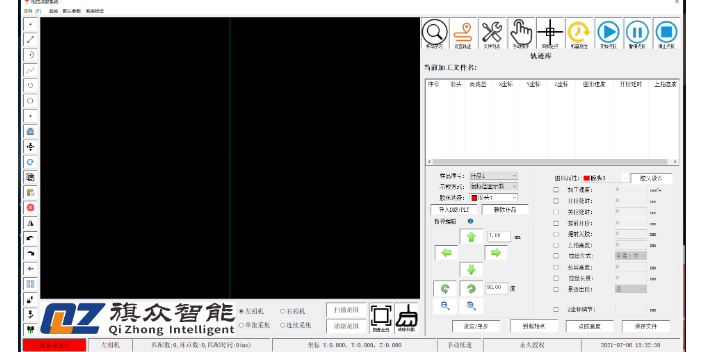
视觉点胶系统—拉丝功能:现在继续来讲视觉点胶系统。什么是拉丝?即针头离开工件表面时,点胶机会继续输出一小段胶水并迅速拔起胶嘴,使胶水形成一条类似拉丝的形状。为什么会出现拉丝的现象:在使用高粘度的胶水进行点胶时,由于胶水黏度过高,就容易出现拉丝现象。拉丝功能可以控制胶水的流量和形状,防止产生气泡或者浸润不良的问题,从而提高点胶质量和效率。旗众智能视觉点胶系统—数据采集功能:旗众视觉点胶系统在数据采集方面具备以下特点:一设备管理功能。设备状态直观显示,保证在线数据的真实性。同时提供标准化设备数据信息统计报表,包含胶水记录、点胶阀类型、工艺类型和运行数据等,并支持数据导出功能。二数据全方面采集。模块化设计,标准化管理,给客户带来更灵活的采集。三人性化操作界面。本系统采用简洁明了的工业UI设计风格,数据直观准确,页面简单,人性化操作逻辑,大幅度降低学习成本,避免误操作概率。视觉点胶系统通过 AI 算法优化点胶工艺,保障复杂图形点胶均匀流畅。广州双平台视觉点胶系统费用
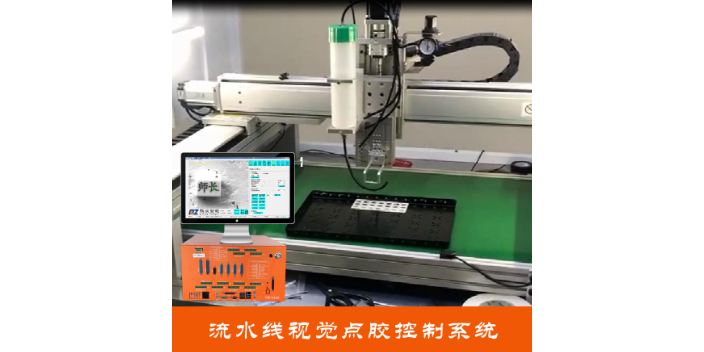
视觉点胶系统实时监测点胶过程,异常情况及时报警并停机。深圳R轴旋转视觉点胶系统单价
视觉点胶系统在使用之前需要进行定位校准,主要包括机械位置校准和视觉位置校准。机械位置校准:保证点胶准确度的前提是要先保证机械结构的准确度,因此需要进行机械位置校准。首先需要通过手动控制机械臂将各关节移动到规定位置,如机械臂的零位、水平位、垂直位等。这些位置需要与机床坐标系建立对应关系。然后需要通过机器人控制系统中的机械补偿功能,对机械臂在各关节的误差进行补偿,保证其运动的精度和准确度。视觉位置校准:首先需要安装并调试好相机、光源等视觉系统硬件设备。然后需要准备标定板,标定板上通常会有一系列已知大小的标记,可以通过标记在图片中的位置来计算相机内外参数,建立相机坐标系和机床坐标系之间的转换关系。进行视觉位置校准时,需要通过点胶笔尖和相机之间的坐标变换,将视觉坐标系中的点转换到机床坐标系中。深圳R轴旋转视觉点胶系统单价