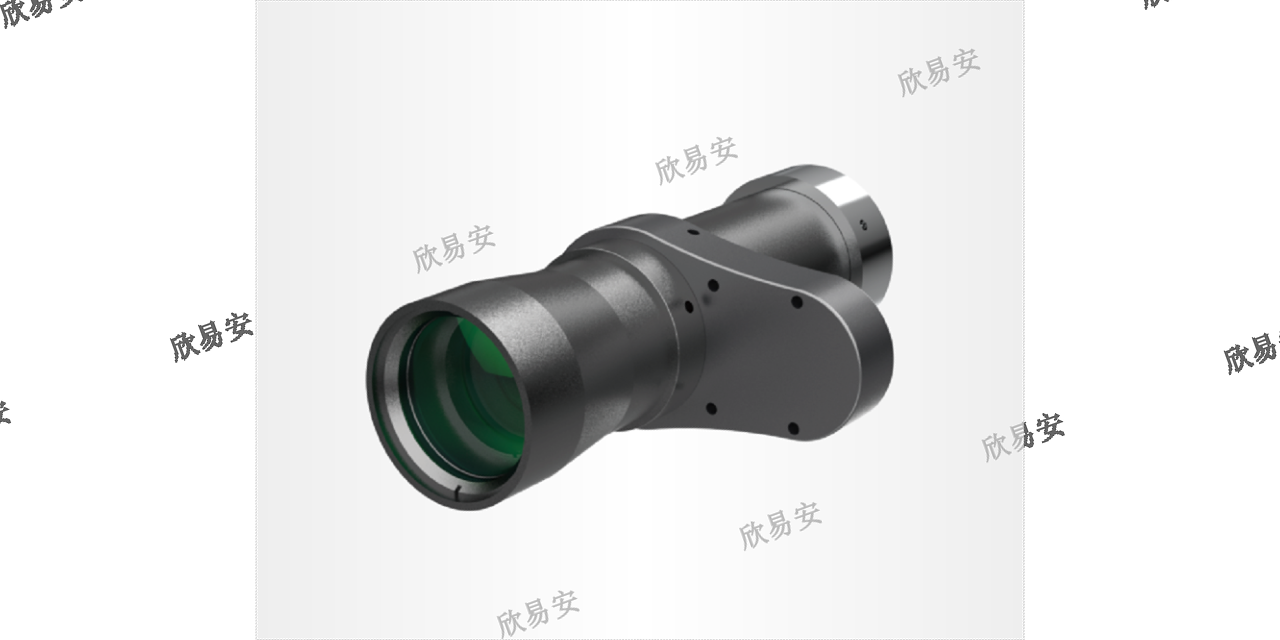
金属零部件量测双远心镜头最常见的应用就是测量精密机械部件。检测对象:金属零部件量测检测要求:尺寸测量高精度解决方案:DTCM118-64H-AL(DTCM系列双远心镜头)+DTCL-64-1W-G(远心平行背光源)+1/1.8"相机金属零部件量测检测结果:视野的中心及边缘的分辨率一致,且畸变极低(0...
视觉镜头基本参数
- 品牌
- 海康,华睿,灵猴
- 型号
- 液态镜头
- 产地
- 苏州
- 是否定制
- 是
视觉镜头企业商机
分辨率分辨率**镜头记录物体细节的能力,以每毫米里面能够分辨黑白对线的数量为计量单位:“线对/毫米”(lp/mm)。分辨率越高的镜头成像越清晰数值孔径数值孔径等于由物体与物镜间媒质的折射率n与物镜孔径角的一半(a\2)的正弦值的乘积,计算公式为N.A=n*sina/2。数值孔径与其它光学参数有着密切的关系,它与分辨率成正比,与放大率成正比。也就是说数值孔径,直接决定了镜头分辨率,数值孔径越大,分辨率越高,否则反之后背焦准确来说,后倍焦是相机的一个参数,指相机接口平面到芯片的距离。但在线扫描镜头或者大面阵相机的镜头选型时,后倍焦是一个非常重要的参数,因为它直接影响镜头的配置。不同厂家的相机,哪怕接口一样也可能有不同的后倍焦节圈的作用加与不加节圈都不会影响相机的焦距,焦距本身是镜头固有的属性。相机接圈,可以增大焦平面到镜头的距离,使镜头拍摄物体的距离更近,相当于微距摄影,成像更大。机器视觉镜头的光学设计可以优化图像的对比度和清晰度。镇江FA视觉镜头怎么样
在航空航天领域,CE 认证视觉设备是保障飞行安全与任务成功的关键要素。在飞机的制造过程中,视觉检测系统用于检查机身结构的完整性、零部件的装配精度等。这些系统经过 CE 认证,能够适应航空航天制造环境的严苛要求,保证检测结果的准确性与可靠性。在飞行过程中,机载视觉设备可以辅助飞行员进行导航、着陆等操作,例如在恶劣天气条件下提供跑道的清晰图像,确保飞机安全降落。此外,在航天探测器的研发中,CE 认证视觉技术用于对遥远天体的观测与数据采集,助力人类探索宇宙的奥秘。镇江FA视觉镜头怎么样机器视觉镜头的镜片表面需要防止水珠和灰尘的影响。
汽车作为现代生活必不可少的工具,它的每一个零部件都关系着一辆汽车的性能、质量,关系着它的安全性,所以对汽车零部件的检测是制造中一步至关重要的环节,视觉系统(特别是双远心镜头)起到了重要的作用。
检测对象:汽车发动机保险丝盒塑料框架检测要求:检测有无多胶缺胶检出**小0.1mm的缺陷视野150*100
解决方案:DTCM35FH-240H-AL(DTCM系列双远心镜头)+DTCL-240-1W-G+29M全画幅相机
成果:检测良品率98.5%,检测时间为2S/1PCS,**提高工作效率。
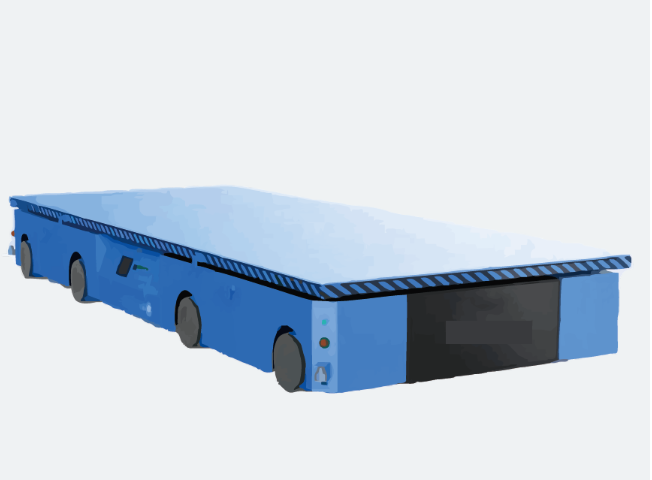
无需改造现场环境:未来机器人的**是在自然环境中的视觉定位导航技术,无需对客户现场进行任何改变、无需磁线、磁钉、激光反射板等人工标记,*通过视觉自然特征即可实现高效的定位导航。降低项目实施难度、减少实施时间;高性能:从原理上讲,视觉捕获二维图像信息,图像中不仅包含轮廓信息,还包含颜色信息。其中,颜色信息是不能通过其他传感器得到的。而颜色信息对于移动机器人自主定位、控制、避撞纠偏都非常有价值。通过丰富的视觉信息,未来机器人的AGV产品及改装方案可以实现高效(直线速度2m/s,过弯速度1.5m/s(过弯不停车))、高精度(位置误差<1cm)、高稳定性(失误率<0.1%)的自主导航。机器视觉镜头的光学系统需要进行精密校准以确保准确的成像。
双远心镜头最常见的应用就是测量精密机械部件。其中有许多精密机械部件是生产用于汽车行业的,例如发动机的轴、阀、活塞及其他部件。像管道或挤制铝型材等部件通常由**机器进行离线控制。远心镜头经常被用来控制小型机械部件的尺寸。检测对象:汽车零配件螺丝螺纹检测检测要求:横面螺纹弧度检测高精度解决方案:DTCM125-26-AL(DTCM系列双远心镜头)+DTCL-26-1W-G(远心平行背光源)+1/2.5"5M相机检测结果:视野的中心及边缘的分辨率一致,且畸变极低(0.06%);搭配平行背光源,比起传统的平板背光源,边缘更加锐利,灰度过渡像素更少,同时视野中心和周边的亮度保持均匀,比较大限度发挥了镜头的高分辨率特点,极大的提高了测量的精度;有效光圈数为F6.8,在保证了分辨率的情况下,景深也达到了项目需求;所测效果图机器视觉镜头的镜片材质选择会影响成本和性能。镇江FA视觉镜头怎么样
机器视觉镜头的焦距决定了镜头的放大倍率和视场大小。镇江FA视觉镜头怎么样
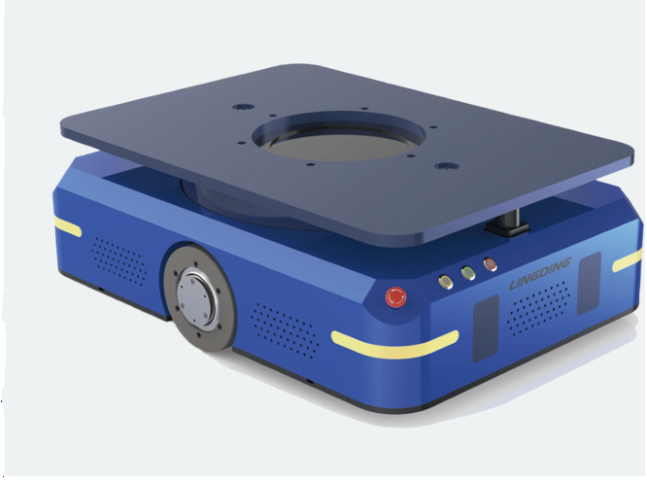
SLAM(SimultaneousLocalizationandMapping),也就是同时定位与地图构建,它是指搭载特定传感器的车辆、无人机等移动机器人,在没有环境先验信息(什么是先验信息?可以自己查一下)的情况下,在运动过程中,估计自己的运动状态,同时建立环境模型的一系列任务。目前大家接触比较多的,已经将SLAM技术应用于实际生活中的,就是扫地机器人了。我们来想一下:扫地机器人来到一个陌生的环境后,是怎样去清扫一个垃圾呢?一个直观的想法就是机器人先确定自己的位置,然后确定垃圾相对于自身的位置,这样就有了一个起点和终点,机器人只需要从起点移动到终点就能清扫这个垃圾了。但是这是很直观的想法,而这个想法的前提是:我们清楚房间的地图构造,这样我们才能更好地完成垃圾清扫的任务。所以扫地机器人需要完成的流程应该是:了解自己周围的环境,构建房间地图,确认自己与垃圾的位置,然后规划路线,移动过去,完成清扫。而这整个流程中,构建地图、进行自身的定位,就是咱们SLAM的主要任务了。镇江FA视觉镜头怎么样
与视觉镜头相关的文章
上海半导体视觉镜头种类
- 杭州常规远心视觉镜头设备厂家 2025-03-29
- 山东光伏视觉镜头电话 2025-03-26
- 青海工业场景搬运视觉镜头维修 2025-03-25
- 360视觉镜头特点 2025-03-21
- 湖南工业场景搬运视觉镜头生产厂家 2025-03-21
- 云南储能视觉镜头厂家 2025-03-20
- 贵州医药视觉镜头有哪些 2025-03-19
- 合肥FA视觉镜头种类 2025-03-16
- 重庆半导体视觉镜头维修 2025-03-16
- 上海视觉镜头厂家 2025-03-15
- 山东光伏视觉镜头有哪些 2025-03-15
- 南京视觉镜头厂家 2025-03-14
与视觉镜头相关的产品
与视觉镜头相关的新闻
-
金山区360视觉镜头特点 2025-03-11 08:17:41产品特征:1.高分辨率:我们的机器视觉镜头具有高分辨率的特点,能够捕捉到细微的细节,提高检测的准确性。2.多功能性:我们的产品具有多种功能,包括缺陷检测、尺寸测量、颜色识别等,能够满足不同的检测需求。3.易于集成:我们的机器视觉镜头具有良好的兼容性和接口,能够与其他设备和系统进行无缝集成,方便客户的...
-
松江区常规远心视觉镜头排名 2025-03-09 08:52:28UL 认证视觉镜头在智能交通系统中有着广泛应用。在交通路口的监控设备里,它可以清晰地拍摄车辆的牌照信息,即使在车辆高速行驶或光线不佳的情况下,依然能保证图像的清晰度与准确性,这得益于其符合 UL 认证标准的光学性能与图像处理算法。同时,它还能监测交通流量、车辆行驶速度以及道路状况,为交通管理部门提供...
-
安庆视觉镜头设备厂家 2025-03-09 07:54:40FA 视觉镜头在家具制造行业推动着生产工艺的升级。在木材加工环节,它可以检测木材的纹理、色泽以及是否存在缺陷,如虫蛀、裂缝等,以便合理规划木材的切割与使用。在家具组装过程中,FA 视觉镜头对零部件的装配精度进行监控,确保各个部件之间的连接紧密、平齐。在家具表面涂装工序,它检查涂装的均匀性和光泽度,使...
-
蚌埠常规远心视觉镜头 2025-03-06 07:53:45FA 视觉镜头在纺织行业也有着独特的应用价值。在纺织面料的生产环节,它可以对织物的纹理、色泽、瑕疵等进行检测。它能够准确地识别出面料上的断纱、污渍、孔洞等缺陷,并准确标记出其位置。在印染工序中,FA 视觉镜头可以对比印染后的颜色与标准色卡,确保色彩的一致性和均匀性。通过对纺织生产全过程的视觉监控,企...
与视觉镜头相关的问题
与视觉镜头相关的标签
新闻资讯
产品推荐
-

南京电商仓储AMR价格表
2025-04-25 -

山西钢铁AGV种类
2025-04-25 -

杨浦区重载AGV
2025-04-25 -
深圳制造业AGV价格
2025-04-24 -
青海机场行李AGV种类
2025-04-24 -
普陀区重载AGV商家
2025-04-24 -
徐汇区UR认证AGV排名
2025-04-24 -

淮安5GAMR对比
2025-04-24 -
广东电商仓储AMR厂家
2025-04-24