直驱力控方式则是通过协作机器人各个关节采用直流电机驱动,电流与转矩成正比。通过精确控制电流的大小,机器人能够实现对力的精确控制。这种方式的主要优点在于防碰撞和拖曳示教功能,使得机器人在作业过程中更加安全可靠。基于力控技术的打磨抛光机器人为现代制造业带来了变革性的变革。通过选择合适的力控方式,机器人不仅能够高效地完成打磨任务,还能确保作业质量,为企业创造更大的价值。机器人在执行与环境产生力交互的任务,例如打磨和装配等,单纯依赖位置控制可能会导致过大的作用力,这可能会对零件或机器人本身造成伤害。为了确保在这些受限环境中的安全有效运动,机器人需要配合力控制来进行操作。采用进口良好的抛光磨头,提高抛光效果和使用寿命。山东自动打磨厂家
这种闭环反馈控制系统使得整个工作状态始终处于与人相对安全隔离的环境中。这不仅降低了工作人员的劳动强度,更重要的是,它极大地提高了工作场所的安全性,改善了工人的工作环境。随着自动化程度的提升,整个生产现场的环境也会得到明显改善。例如,自动化生产线的引入可以有效地降低粉尘排放,这对于保护工人的健康至关重要。自动化还能够有效地控制噪声污染,减少生产过程中的安全隐患,并通过智能化的隐患报警系统,及时发现并处理潜在的安全风险。山东自动打磨厂家抛光机打磨机具备自动报警功能,保障生产安全。

传统的工业机器人通过其高效且精确的位置控制,遵循着控制系统为其设定的路径,在空间中进行精确的移动,进而出色地完成如搬运、检测、喷涂、上下料等一系列作业。然而,随着工业自动化步伐的加快,机器人正逐渐扩展其应用领域,涉足更普遍的工业环境。在这种背景下,单纯的位置控制已逐渐显示出其局限性,特别是在那些需要机器人与环境进行交互作用的应用场景中。在工业制造领域,随着产品工艺标准的不断提高,许多新的制造工艺已无法通过传统工业机器人的位置控制来完美实现。例如,对于精密零部件的柔性装配,或者一致性较差的复杂曲面打磨等任务,传统的位置控制方法可能因工件的一致性问题导致位置误差,从而引发系统瞬间的过载,这不仅可能损坏工件,还可能对机器人本身造成损害。因此,为了满足这些更复杂的工艺需求,我们必须对传统工业机器人的控制方式进行创新和改进。
接连轨道操控方法(CP)是一种对打磨机器人末端执行器在工作空间中的位置和姿态进行连续控制的方法。该方法要求打磨机器人严格遵循预设的轨道和速度,在一定的精度范围内进行运动,且速度可控,轨道平滑,运动平稳,以完成作业任务。在这种操控方式下,打磨机器人的各个关节需要连续、同步地进行相应的运动,从而使其末端执行器形成连续的轨道。该操控方法的主要技术指标包括打磨机器人末端执行器位姿的轨道跟踪精度及运动的平稳性。因此,这种操控方法普遍应用于弧焊、喷漆、去毛边和检测作业等机器人领域。机器具备节能设计,降低能耗。

从客户打磨产品的演进来看,这些产品也在逐渐适应和满足用户多样化的需求。一方面,我们可以根据客户的特定需求,定制功能丰富的自动化产品。这些产品不仅能够集成多种自动化功能,还能在结构上灵活调整,以符合不同客户的个性化需求。另一方面,针对某一特定行业的规模化用户,打磨机器人技术也在逐渐深入该行业,推出更加贴合行业特性和需求的打磨设备。这种定制化和行业特定化的发展趋势,不仅有助于提升自动化打磨机器人在各个领域的应用广度和深度,同时也推动了整个工业自动化领域的创新和发展。未来,随着人工智能、机器学习等先进技术的融合应用,自动化打磨机器人将具备更高的智能化水平,为工业生产带来更大的便利和效益。抛光机打磨机可根据不同材料,选择合适的磨头。山东自动打磨厂家
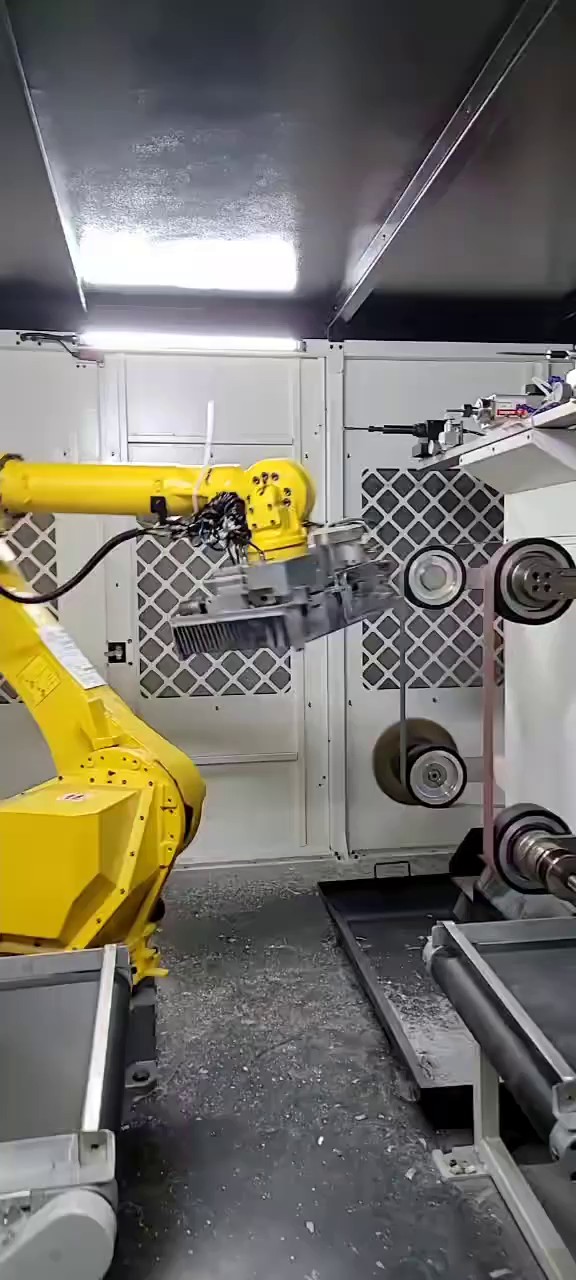
机器具备自动调整磨头压力功能,确保抛光效果。山东自动打磨厂家
打磨抛光机器人在力控技术的驱动下,能够实现高效、精确的自动化打磨作业,为替代传统的人工打磨方式提供了一种切实可行的解决方案。机器人力控打磨主要分为三种方式:六维力控、直驱力控和主动柔顺力控。六维力控方式利用六维力传感器来捕捉力的信号,并将这些信号传递给机器人控制器。控制器通过复杂的力控算法,精确控制机械臂的六个关节动作,确保机器人与工件表面之间的接触力保持恒定。这种方式的优势在于,它支持拖曳示教、装配和打磨等多种作业模式,提高了作业效率和质量。山东自动打磨厂家