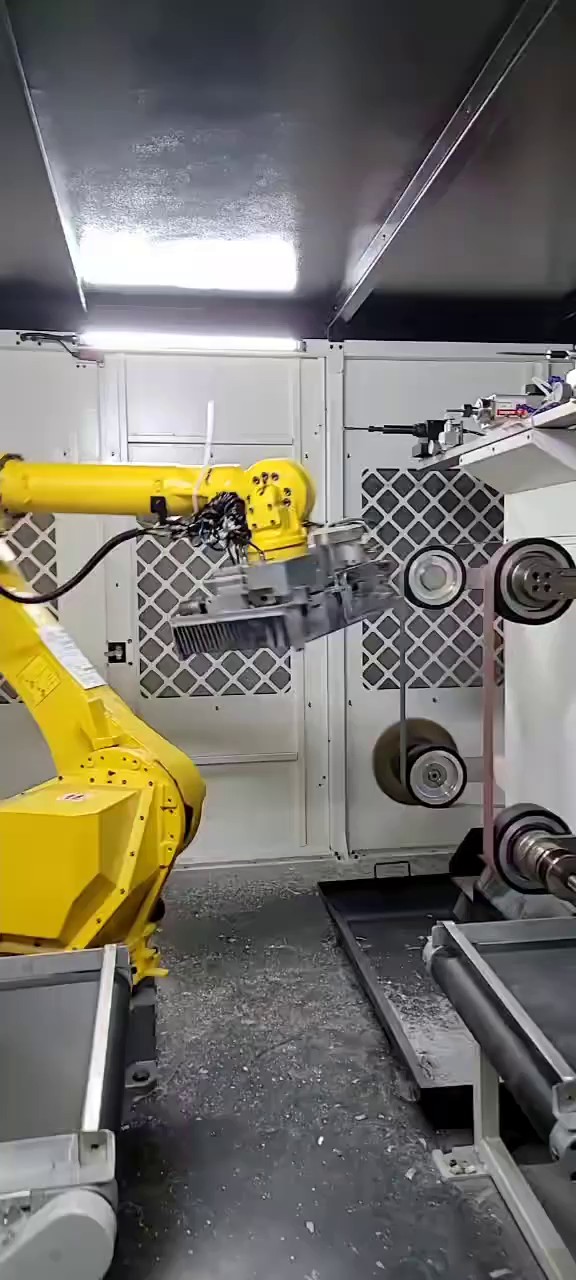
抛光打磨是一项单调乏味、重复性极高的工作。然而,这恰恰是机器人的优势所在。机器人通过预设的程序,能够精确、稳定地完成抛光打磨任务,无论是速度、力度还是精度,都能保持高度一致。即使出现差错,也往往是程序性的,这极大地简化了质量控制的过程。通过引入抛光打磨机器人,不仅可以大幅提高生产效率,降低生产成本,还能确保产品质量的稳定性和一致性。这种技术的应用,将为企业带来明显的经济效益,并在激烈的市场竞争中占据有利地位。适用于复杂形状的金属件抛光,如拐角、孔洞等。宁波机器人打磨工作站
直驱力控方式则是通过协作机器人各个关节采用直流电机驱动,电流与转矩成正比。通过精确控制电流的大小,机器人能够实现对力的精确控制。这种方式的主要优点在于防碰撞和拖曳示教功能,使得机器人在作业过程中更加安全可靠。基于力控技术的打磨抛光机器人为现代制造业带来了变革性的变革。通过选择合适的力控方式,机器人不仅能够高效地完成打磨任务,还能确保作业质量,为企业创造更大的价值。机器人在执行与环境产生力交互的任务,例如打磨和装配等,单纯依赖位置控制可能会导致过大的作用力,这可能会对零件或机器人本身造成伤害。为了确保在这些受限环境中的安全有效运动,机器人需要配合力控制来进行操作。宁波机器人打磨工作站适用于各种金属表面处理,如去除毛刺、氧化层等。

点位操控(PTP)是一种只关注打磨机器人末端执行器在作业空间中特定离散点位置和姿态的操控方式。在操作过程中,只要求打磨机器人能迅速、准确地在相邻各点之间移动,而对达到目标点的移动路径并无特定要求。这种操控方式的两个主要技术指标是定位精度和运动时间。由于其实现相对简单,且对定位精度的要求相对较低,因此,点位操控常常被用于如上下料、转移、点焊以及在电路板上安装元件等只需要在目标点保持末端执行器精确位置和姿态的任务中。尽管这种操控方式相对简单,但要实现2~3um的高定位精度却是一项极具挑战性的任务。
打磨机械手通过其精确的力控制和适应性强的特点,成功解决了传统打磨过程中存在的问题,为制造行业带来了更高的生产效率、更好的产品和更低的成本。在未来,随着技术的不断进步,打磨机械手有望在更多领域发挥更大的作用。在去除毛刺的打磨加工过程中,影响毛刺打磨效果的因素繁多且关键。这其中,刀具、主轴转速、切屑速度以及机器人的运动轨迹都是不可忽视的要素。尤其是机器人的运动轨迹,它直接决定了加工过程中的运动路径。尽管我们深知机器人在重复定位方面的精度极高,但在编程阶段,机器人的点位通常依赖于示教过程。示教过程需要人工进行位置确认,这就不可避免地引入了人为误差,使得点位存在偏差。这种偏差会直接影响到切屑效果,造成加工后的表面质量不均匀。抛光机打磨机具备自动送料和收料功能,提高自动化程度。

这种闭环反馈控制系统使得整个工作状态始终处于与人相对安全隔离的环境中。这不仅降低了工作人员的劳动强度,更重要的是,它极大地提高了工作场所的安全性,改善了工人的工作环境。随着自动化程度的提升,整个生产现场的环境也会得到明显改善。例如,自动化生产线的引入可以有效地降低粉尘排放,这对于保护工人的健康至关重要。自动化还能够有效地控制噪声污染,减少生产过程中的安全隐患,并通过智能化的隐患报警系统,及时发现并处理潜在的安全风险。机器具备自动计数功能,便于生产管理。宁波机器人打磨工作站
机器具备紧急停止按钮,保障工人安全。宁波机器人打磨工作站
大部分金属工件在完成基础的焊接、铸造等工序后,仍需经过打磨、抛光、去倒角等精细化修整,才能满足验收的合格标准。这些精细化修整工序对于力度的控制要求极高,这也是目前自动化打磨去毛刺作业难以完全取代人工的主要原因。因此,为了实现工业制造的全方面自动化,我们必须寻求新的技术突破,以更精确地控制机器人的操作力度,从而确保工件的加工质量,提高生产效率,降低人工成本,为工业制造的转型升级提供强有力的技术支持。通过实施力的柔性控制,柔性打磨力控系统为企业实现打磨过程的自动化提供了有力支持。这一创新技术使得原本依赖人力的打磨工作得以自动化完成,从而大幅提升了生产效率和产品质量。宁波机器人打磨工作站